|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
Functions | |
| def | model_state_callback (message) |
| def | link_state_callback (message) |
| def | calculate_car_velocity () |
| def | calculate_wheel_velocity () |
| def | show_info () |
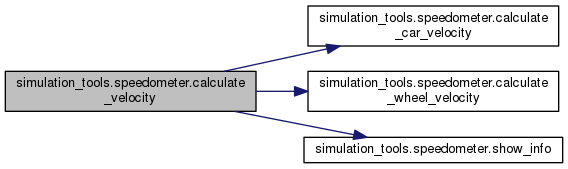
| def | calculate_velocity (event) |
Variables | |
| wheel_velocity = None | |
| car_velocity = None | |
| int | max_car_velocity = 0 |
| model_states_message = None | |
| link_states_message = None | |
| list | LINK_NAMES |
| float | WHEEL_RADIUS = 0.05 |
| bool | idle = True |
| def simulation_tools.speedometer.calculate_car_velocity | ( | ) |
| def simulation_tools.speedometer.calculate_velocity | ( | event | ) |
| def simulation_tools.speedometer.calculate_wheel_velocity | ( | ) |
| def simulation_tools.speedometer.link_state_callback | ( | message | ) |
Definition at line 21 of file speedometer.py.
| def simulation_tools.speedometer.model_state_callback | ( | message | ) |
Definition at line 16 of file speedometer.py.
| def simulation_tools.speedometer.show_info | ( | ) |
| simulation_tools.speedometer.car_velocity = None |
Definition at line 9 of file speedometer.py.
| bool simulation_tools.speedometer.idle = True |
Definition at line 78 of file speedometer.py.
| list simulation_tools.speedometer.LINK_NAMES |
Definition at line 36 of file speedometer.py.
| simulation_tools.speedometer.link_states_message = None |
Definition at line 13 of file speedometer.py.
| int simulation_tools.speedometer.max_car_velocity = 0 |
Definition at line 10 of file speedometer.py.
| simulation_tools.speedometer.model_states_message = None |
Definition at line 12 of file speedometer.py.
| float simulation_tools.speedometer.WHEEL_RADIUS = 0.05 |
Definition at line 41 of file speedometer.py.
| simulation_tools.speedometer.wheel_velocity = None |
Definition at line 8 of file speedometer.py.
 1.8.11
1.8.11