|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
#include <array>#include <cmath>#include <cstdlib>#include <iostream>#include "drive_msgs/drive_param.h"#include "pid_controller.h"#include "rviz_geometry_publisher.h"#include "sensor_msgs/LaserScan.h"#include "std_msgs/Bool.h"#include "std_msgs/Float64.h"#include "wall.h"#include <ros/console.h>#include <ros/ros.h>#include <dynamic_reconfigure/server.h>#include <wallfollowing1/wallfollowing1Config.h>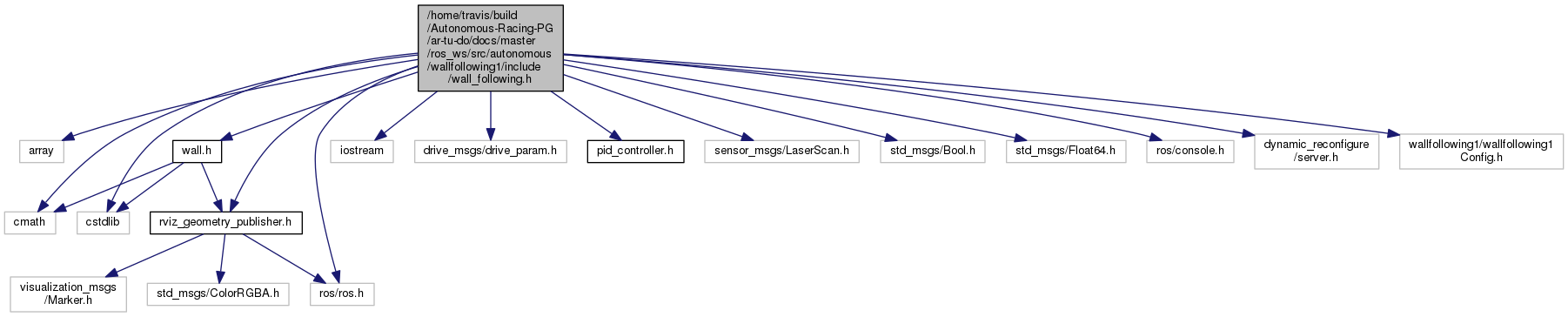
Go to the source code of this file.
Classes | |
| class | WallFollowing |
Variables | |
| constexpr const char * | TOPIC_DRIVE_PARAMETERS = "/input/drive_param/autonomous" |
| constexpr const char * | TOPIC_LASER_SCAN = "/scan" |
| constexpr const char * | TOPIC_EMERGENCY_STOP = "/emergency_stop" |
| constexpr const char * | TOPIC_VISUALIZATION = "/wallfollowing_visualization" |
| constexpr const char * | LIDAR_FRAME = "laser" |
| constexpr float | DEG_TO_RAD = M_PI / 180.0 |
| constexpr float DEG_TO_RAD = M_PI / 180.0 |
Definition at line 28 of file wall_following.h.
| constexpr const char* LIDAR_FRAME = "laser" |
Definition at line 26 of file wall_following.h.
| constexpr const char* TOPIC_DRIVE_PARAMETERS = "/input/drive_param/autonomous" |
Definition at line 21 of file wall_following.h.
| constexpr const char* TOPIC_EMERGENCY_STOP = "/emergency_stop" |
Definition at line 23 of file wall_following.h.
| constexpr const char* TOPIC_LASER_SCAN = "/scan" |
Definition at line 22 of file wall_following.h.
| constexpr const char* TOPIC_VISUALIZATION = "/wallfollowing_visualization" |
Definition at line 24 of file wall_following.h.
 1.8.11
1.8.11 
