|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
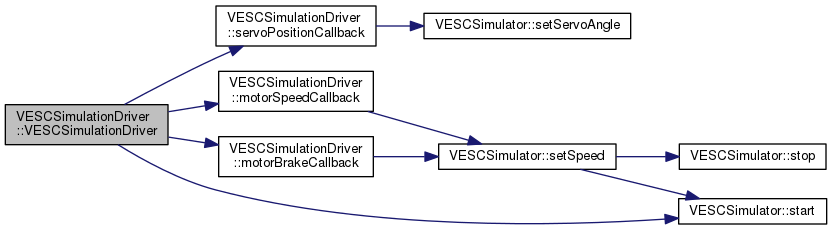
Class to convert Drive Parameter Messages into single messages. More...
#include <vesc_sim_driver.h>
Public Member Functions | |
| VESCSimulationDriver () | |
| Constructor that creates subscribers and publishers. More... | |
| void | motorSpeedCallback (const std_msgs::Float64::ConstPtr &throttle_message) |
| Callback for ROS Subscriber. More... | |
| void | servoPositionCallback (const std_msgs::Float64::ConstPtr &servo_position) |
| Callback for ROS Subscriber. More... | |
| void | motorBrakeCallback (const std_msgs::Float64::ConstPtr &motor_brake) |
| Callback for ROS Subscriber. More... | |
Class to convert Drive Parameter Messages into single messages.
Class to convert Drive Parameter Messages (steering angle and velocity) into single messages for each wheel velocity and for front wheel steering angles based on Ackermann equations.
Definition at line 33 of file vesc_sim_driver.h.
| VESCSimulationDriver::VESCSimulationDriver | ( | ) |
Constructor that creates subscribers and publishers.
Definition at line 5 of file vesc_sim_driver.cpp.
| void VESCSimulationDriver::motorBrakeCallback | ( | const std_msgs::Float64::ConstPtr & | motor_brake | ) |
Callback for ROS Subscriber.
| motor_brake |
Definition at line 49 of file vesc_sim_driver.cpp.


| void VESCSimulationDriver::motorSpeedCallback | ( | const std_msgs::Float64::ConstPtr & | throttle_message | ) |
Callback for ROS Subscriber.
| motor_speed | contains electrical RPM |
Definition at line 36 of file vesc_sim_driver.cpp.


| void VESCSimulationDriver::servoPositionCallback | ( | const std_msgs::Float64::ConstPtr & | servo_position | ) |
Callback for ROS Subscriber.
| servo_position | contains angle with value 0 upto 1 |
Definition at line 65 of file vesc_sim_driver.cpp.


 1.8.11
1.8.11 
