|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
Classes | |
| class | Parameters |
| class | PIDController |
Functions | |
| def | map (in_lower, in_upper, out_lower, out_upper, value) |
| def | drive (angle, velocity) |
| def | get_scan_as_cartesian (laser_scan) |
| def | find_left_right_border (points, margin_relative=0.1) |
| def | follow_walls (left_circle, right_circle, barrier, delta_time) |
| def | handle_scan (laser_scan, delta_time) |
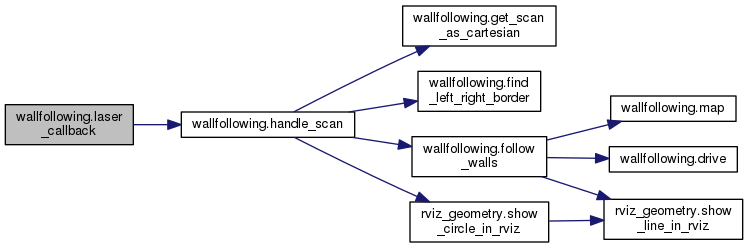
| def | laser_callback (scan_message) |
| def | dynamic_configuration_callback (config, level) |
Variables | |
| string | TOPIC_DRIVE_PARAMETERS = "/input/drive_param/autonomous" |
| string | TOPIC_LASER_SCAN = "/scan" |
| int | last_speed = 0 |
| last_scan = None | |
| parameters = None | |
| pid = PIDController(1, 1, 1) | |
| drive_parameters_publisher | |
| def wallfollowing.drive | ( | angle, | |
| velocity | |||
| ) |
| def wallfollowing.dynamic_configuration_callback | ( | config, | |
| level | |||
| ) |
Definition at line 199 of file wallfollowing.py.
| def wallfollowing.find_left_right_border | ( | points, | |
margin_relative = 0.1 |
|||
| ) |
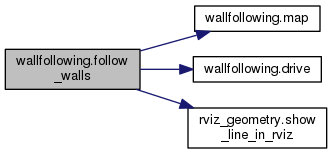
| def wallfollowing.follow_walls | ( | left_circle, | |
| right_circle, | |||
| barrier, | |||
| delta_time | |||
| ) |
Definition at line 108 of file wallfollowing.py.

| def wallfollowing.get_scan_as_cartesian | ( | laser_scan | ) |
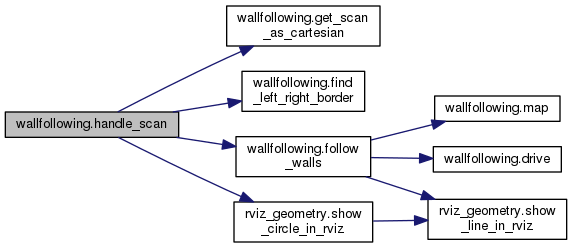
| def wallfollowing.handle_scan | ( | laser_scan, | |
| delta_time | |||
| ) |
Definition at line 157 of file wallfollowing.py.

| def wallfollowing.laser_callback | ( | scan_message | ) |
| def wallfollowing.map | ( | in_lower, | |
| in_upper, | |||
| out_lower, | |||
| out_upper, | |||
| value | |||
| ) |
| wallfollowing.drive_parameters_publisher |
Definition at line 213 of file wallfollowing.py.
| wallfollowing.last_scan = None |
Definition at line 185 of file wallfollowing.py.
| int wallfollowing.last_speed = 0 |
Definition at line 22 of file wallfollowing.py.
| wallfollowing.parameters = None |
Definition at line 209 of file wallfollowing.py.
| wallfollowing.pid = PIDController(1, 1, 1) |
Definition at line 210 of file wallfollowing.py.
| string wallfollowing.TOPIC_DRIVE_PARAMETERS = "/input/drive_param/autonomous" |
Definition at line 19 of file wallfollowing.py.
| string wallfollowing.TOPIC_LASER_SCAN = "/scan" |
Definition at line 20 of file wallfollowing.py.
 1.8.11
1.8.11