|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
#include <ros/ros.h>#include <drive_msgs/drive_param.h>#include <std_msgs/Float64.h>#include "vesc_sim.h"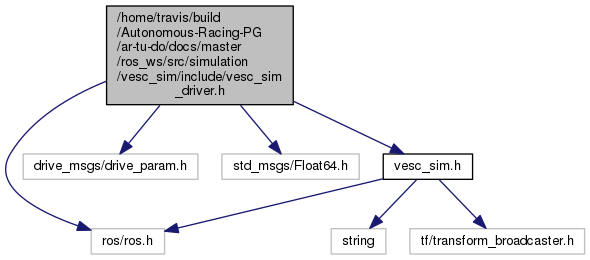
Go to the source code of this file.
Classes | |
| class | VESCSimulationDriver |
| Class to convert Drive Parameter Messages into single messages. More... | |
Namespaces | |
| simulation | |
Variables | |
| constexpr const char * | COMMAND_POSITION = "/commands/servo/position" |
| constexpr const char * | COMMAND_THROTTLE = "/commands/motor/speed" |
| constexpr const char * | COMMAND_BRAKE = "/commands/motor/brake" |
| constexpr const char * | TOPIC_DRIVE_PARAM = "/commands/drive_param" |
| constexpr const char * | CMD_VEL = "cmd_vel" |
| constexpr const char * | simulation::WHEEL_LEFT_BACK_VELOCITY = "/racer/left_wheel_back_velocity_controller/command" |
| constexpr const char * | simulation::WHEEL_LEFT_FRONT_VELOCITY = "/racer/left_wheel_front_velocity_controller/command" |
| constexpr const char * | simulation::WHEEL_RIGHT_BACK_VELOCITY = "/racer/right_wheel_back_velocity_controller/command" |
| constexpr const char * | simulation::WHEEL_RIGHT_FRONT_VELOCITY = "/racer/right_wheel_front_velocity_controller/command" |
| constexpr const char * | simulation::LEFT_STEERING_POSITION = "/racer/left_steering_hinge_position_controller/command" |
| constexpr const char * | simulation::RIGHT_STEERING_POSITION = "/racer/right_steering_hinge_position_controller/command" |
| constexpr const char* CMD_VEL = "cmd_vel" |
Definition at line 14 of file vesc_sim_driver.h.
| constexpr const char* COMMAND_BRAKE = "/commands/motor/brake" |
Definition at line 12 of file vesc_sim_driver.h.
| constexpr const char* COMMAND_POSITION = "/commands/servo/position" |
Definition at line 10 of file vesc_sim_driver.h.
| constexpr const char* COMMAND_THROTTLE = "/commands/motor/speed" |
Definition at line 11 of file vesc_sim_driver.h.
| constexpr const char* TOPIC_DRIVE_PARAM = "/commands/drive_param" |
Definition at line 13 of file vesc_sim_driver.h.
 1.8.11
1.8.11 
