|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
|
Autonomous Racing
1
f1tenth Project Group of Technical University Dortmund, Germany
|
Public Member Functions | |
| def | __init__ (self) |
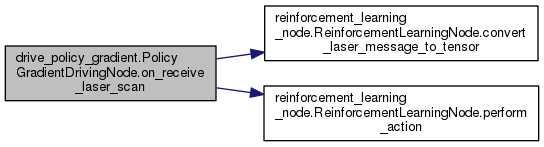
| def | on_receive_laser_scan (self, message) |
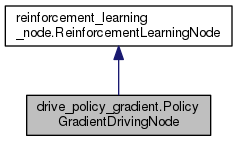
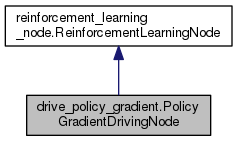
 Public Member Functions inherited from reinforcement_learning_node.ReinforcementLearningNode Public Member Functions inherited from reinforcement_learning_node.ReinforcementLearningNode | |
| def | __init__ (self, actions, laser_sample_count) |
| def | perform_action (self, action_index) |
| def | convert_laser_message_to_tensor (self, message, use_device=True) |
| def | on_receive_laser_scan (self, message) |
Public Attributes | |
| policy | |
| Public Attributes inherited from reinforcement_learning_node.ReinforcementLearningNode | |
| scan_indices | |
| laser_sample_count | |
| actions | |
| drive_parameters_publisher | |
ROS node to drive the car using previously learned Policy Gradient weights
Definition at line 11 of file drive_policy_gradient.py.
| def drive_policy_gradient.PolicyGradientDrivingNode.__init__ | ( | self | ) |
Definition at line 16 of file drive_policy_gradient.py.
| def drive_policy_gradient.PolicyGradientDrivingNode.on_receive_laser_scan | ( | self, | |
| message | |||
| ) |
| drive_policy_gradient.PolicyGradientDrivingNode.policy |
Definition at line 17 of file drive_policy_gradient.py.
 1.8.11
1.8.11